You can find the technical program of ICVS 2015 here: [final program].
The list of papers to be presented in each session (both Oral and Poster) of ICVS 2015 can be found: [papers per session].
- Oral Presentations: Each paper selected for oral presentation will be given 20 min in total. The presentation itself should not exceed 15 min, and as a result there should be left at least 5 min for questions and discussion.
- Poster Presentations: Posters should be formatted to DIN A0 size (841mm x 1189mm or 33.1″ x 46.8″) and in portrait orientation.
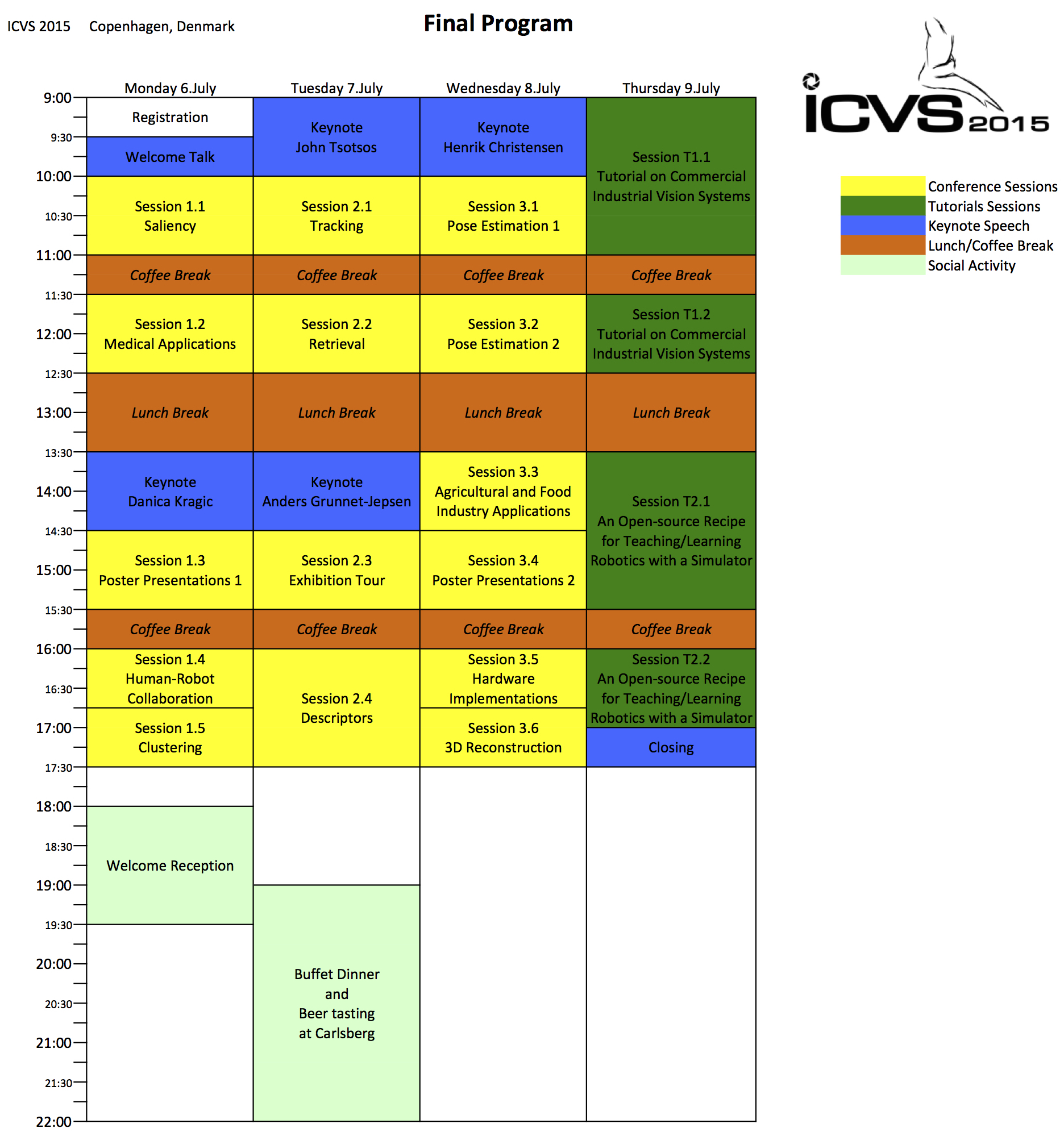
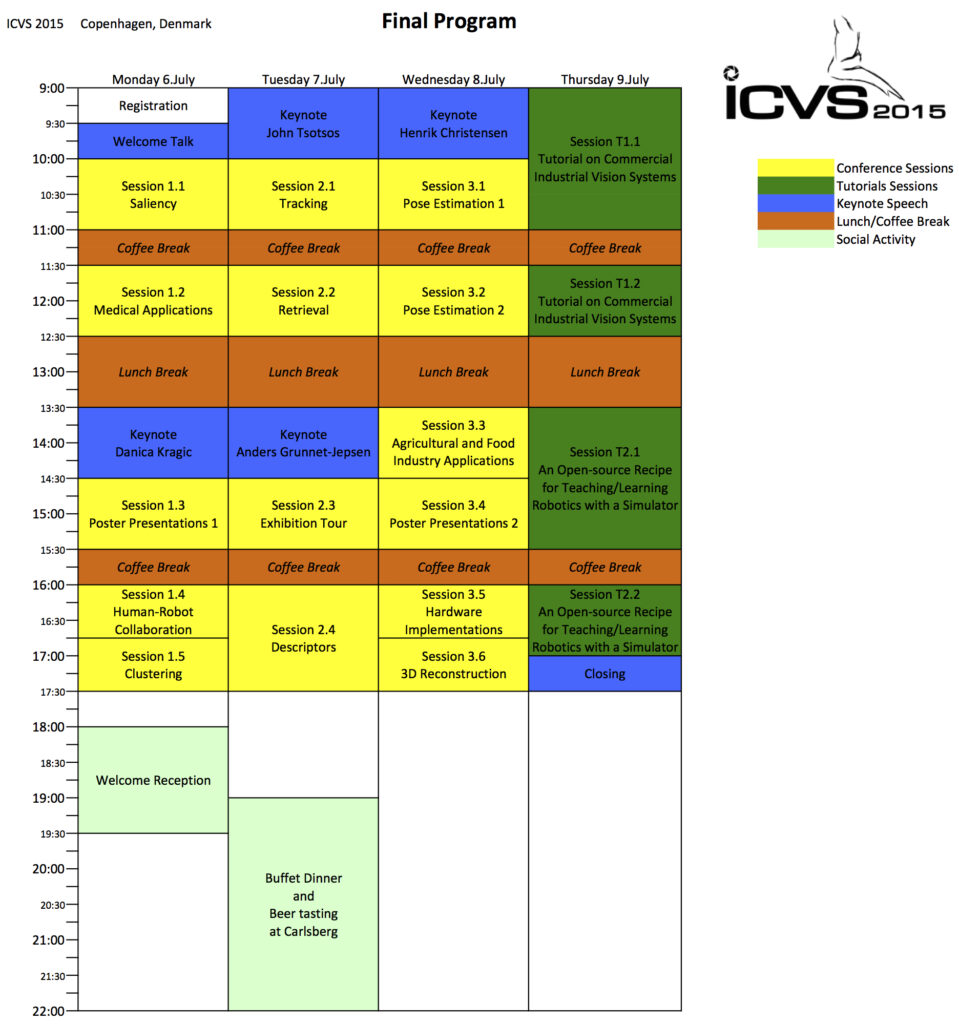
Final Program
List of papers to be presented per session
Oral Presentations
Session 1.1 : Saliency [Monday, July 6 @ 10:00-11:00]
- [10:00-10:20] “Saliency-Guided Object Candidates Based on Gestalt Principles”,
Thomas Werner, German Martin Garcia, Simone Frintrop.
- [10:20-10:40] “Person Re-identification Based on Multi-directional Saliency Metric learning”,
Zhonghua Huo, Ying Chen.
- [10:40-11:00] “Image Saliency Applied to Infrared Images for Unmanned Maritime Monitoring”,
Gonçalo Cruz, Alexandre Bernardino.
Session 1.2 : Medical Applications [Monday, July 6 @ 11:30-12:30]
- [11:30-11:50] “Comparison of Statistical Features for Medical Colour Image Classification”,
Cecilia Di Ruberto, Giuseppe Fodde, Lorenzo Putzu.
- [11:50-12:10] “Learning Appearance Features for Pain Detection using The UNBC-McMaster Shoulder Pain Expression Archive Database”,
Henrik Pedersen.
- [12:10-12:30] “A Vision-based System for Movement Analysis in Medical Applications”,
Sofija Spasojevic, José Santos-Victor, Tihomir Ilic, Sladjan Milanovic, Veljko Potkonjak, Aleksandar Rodic.
Session 1.4 : Human-Robot Collaboration [Monday, July 6 @ 16:00-16:40]
- [16:00-16:20] “Visual estimation of attentive cues in HRI: The case of torso and head pose”,
Markos Sigalas, Maria Pateraki, Panos Trahanias.
- [16:20-16:40] “Learning Human Priors for Task-Constrained Grasping”,
Martin Hjelm, Carl Henrik Ek, Danica Kragic, Renaud Detry.
Session 1.5 : Clustering [Monday, July 6 @ 16:50-17:30]
- [16:50-17:10] “An Online Adaptive Fuzzy Clustering and Its Application for Background Suppression”,
Thanh Nguyen, Jonathan Wu, Dibyendu Mukherjee.
- [17:10-17:30] “Estimating the number of clusters with database for texture segmentation using Gabor filter”,
Minkyu Kim, Jeong-Mook Lim, Heesook Shin, Changmok Oh, Hyun-Tae Jeong.
Session 2.1 : Tracking [Tuesday, July 7 @ 10:00-11:00]
- [10:00-10:20] “Revisiting Robust Visual Tracking Using Pixel-Wise Posteriors”,
Falk Schubert, Daniele Casaburo, Dirk Dickmanns, Vasileios Belagiannis.
- [10:20-10:40] “Quantifying the effect of a colored glove in the 3D tracking of a human hand”,
Antonios Argyros, Konstantinos Roditakis.
- [10:40-11:00] “Robust Marker-Based Tracking for Measuring Crowd Dynamics”,
Wolfgang Mehner, Maik Boltes, Bastian Leibe, Markus Mathias.
Session 2.2 : Retrieval [Tuesday, July 7 @ 11:30-12:30]
- [11:30-11:50] “Region-of-Interest Retrieval in Large Image Datasets With Voronoi VLAD”
Aaron Chadha, Yiannis Andreopoulos.
- [11:50-12:10] “Querying 3D Data by Adjacency Graphs”,
Nils Bore, Patric Jensfelt, John Folkesson.
- [12:10-12:30] “Efficient Media Retrieval from Non-Cooperative Queries”
Kevin Shih, Wei Di, Vignesh Jagadeesh, Robinson Piramuthu.
Session 2.4 : Descriptors [Tuesday, July 7 @ 16:00-17:30]
- [16:00-16:20] “Improving FREAK Descriptor for Image Classification”,
Cristina Hilario Gomez, Kartheek Medathati, Pierre Kornprobst, Vittorio Murino, Diego Sona.
- [16:20-16:40] “Geostatistics for Context Based Image Classification”,
Felipe Codevilla, Nuno Gracias, Silvia Botelho, A.S.M. Shihavuddin, Samuel Purkis, Rafel Garcia.
- [16:40-17:00] “How good is Kernel Descriptor on Depth Motion Map for Action Recognition”,
Thanh-Hai Tran, Van-Toi Nguyen.
- [17:00-17:20] “Bayesian Formulation of Gradient Orientation Matching”,
Hakan Ardo.
- [17:20-17:40 ] “Arabic-Latin Offline Signature Recognition Based on Shape Context Descriptor”,
Ahmed Omar, Nagia Ghanem, Mohamed Ismail.
Session 3.1 : Pose Estimation 1 [Wednesday, July 8 @ 10:00-11:00]
- [10:00-10:20] “3D Object Pose Refinement in Range Images”,
Xenophon Zabulis, Manolis Lourakis, Panagiotis Koutlemanis.
- [10:20-10:40] “Teach it Yourself – Fast Modeling of Industrial Objects for 6D Pose Estimation”,
Thomas Sølund, Thiusius Rajeeth Savarimuthu, Anders Buch, Anders Beck, Norbert Krüger, Henrik Aanæs.
- [10:40-11:00] “Shape Dependency of ICP Pose Uncertainties in the Context of Pose Estimation Systems”,
Thorbjørn Iversen, Anders Buch, Norbert Krüger, Dirk Kraft.
Session 3.2 : Pose Estimation 2 [Wednesday, July 8 @ 11:30-12:30]
- [11:30-11:50] “Object Detection Using a Combination of Multiple 3D Feature Descriptors”,
Lilita Kiforenko, Anders Buch, Norbert Krüger.
- [11:50-12:10] “Online Re-Calibration for Robust 3D Measurement using Single Camera- PantoInspect Train Monitoring System”,
Deepak Dwarakanath, Carsten Griwodz, Paal Halvorsen, Jacob Lildballe.
- [12:10-12:30] “Sleep Pose Recognition In An ICU Using Multimodal Data and Environmental Feedback”,
Carlos Torres.
Session 3.3 : Agriculture and Food Industry Applications [Wednesday, July 8 @ 13:30-14:30]
- [13:30-13:50] “Object Detection and Terrain Classification in Agricultural Fields using 3D Lidar Data”,
Mikkel Kragh, Rasmus Jørgensen, Henrik Pedersen.
- [13:50-14:10] “Soil Surface Roughness using Cumulated Gaussian Curvature”,
Thomas Jensen, Lars Munkholm, Ole Green, Henrik Karstoft.
- [14:10-14:30] “Including 3D-textures in a Computer Vision System to analyze quality traits of loin”,
Daniel Caballero, Mar Avila, Maria Luisa Duran, Andres Caro, Trinidad Perez-Palacios.
Session 3.5 : Hardware Implementations [Wednesday, July 8 @ 16:00-16:40]
- [16:00-16:20] “A Flexible High-Resolution Real-Time Low-Power Stereo Vision Engine”,
Stefan Gehrig, Reto Stalder, Nico Schneider.
- [16:20-16:40] “Real time Vision System for Obstacle Detection and Localization on FPGA”,
Ali Alhamwi, Bertrand Vandeportaele, Jonathan Piat.
Session 3.6 : 3D Reconstruction [Wednesday, July 8 @ 16:50-17:30]
- [16:50-17:10] “Surface Reconstruction from Intensity Image using Illumination Model based Morphable Modeling”,
Zhi Yang, Varun Chandola.
- [17:10-17:30] “Quantitative Analysis of Surface Reconstruction Accuracy Achievable with the TSDF Representation”,
Diana Werner, Philipp Werner, Ayoub Al-Hamadi.
Poster Presentations
Session 1.3 : Poster Presentations 1 [Monday, July 6 @ 14:30-15:30]
- “An Efficient Eye Tracking using POMDP for Robust Human Computer Interaction”,
Ji Hye Rhee, WonJun Sung, Mi Young Nam, Hyeran Byun, Phill Kyu Rhee.
- “CBIR Service for Object Identification”,
Mikuláš Krupička.
- “Towards a robust system helping underwater archaeologists through the acquisition of geo-referenced optical and acoustical data”,
Benedetto Allotta, Riccardo Costanzi, Massimo Magrini, Niccolò Monni, Davide Moroni, Maria Antonietta Pascali, Marco Reggiannini, Alessandro Ridolfi, Ovidio Salvetti, Marco Tampucci.
- “Enhanced Residual Orientation for Improving Fingerprint Quality”,
Jing-Wein Wang, Ngoc Tuyen Le, Tzu-Hsiung Chen.
- “An Informative Logistic Regression for Cross-domain Image Classification”,
Guangtang Zhu, Hanfang Yang, Xiangdong Zhou.
- “Human Action Recognition Using Dominant Motion Pattern”,
Snehasis Mukherjee, Apurbaa Mallik, Dipti Prasad Mukherjee.
- “Comparative Evaluation of 3D Pose Estimation of Industrial Objects in RGB Pointclouds”,
Bjarne Grossmann, Mennatullah Siam, Volker Krüger.
Session 3.4 : Poster Presentations 2 [Wednesday, July 8 @ 14:30-15:30]
- “Adaptive Neuro-Fuzzy Controller for Multi-Object Tracker”,
Duc Phu Chau, Kartick Subramanian, Francois Bremond.
- “Human Action Recognition Using Dominant Pose Duplet”,
Snehasis Mukherjee.
- “Robust Facial Feature Localization using Data-Driven Semi-Supervised Learning Approach”,
Yoonyoung Kim, SungJin Hong, Ji Hye Rhee, Mi Young Nam, Phillkyu Rhee.
- “D2CO: Fast and Robust Registration of 3D Textureless Objects using the Directional Chamfer Distance”,
Alberto Pretto, Marco Imperoli.
- “Can Speedup Assist Accuracy? An on-board GPU-Accelerated Image Georeference Method for UAVs”,
Loukas Bampis, Evangelos Karakasis, Angelos Amanatiadis, Antonios Gasteratos.
- “Differential Optical Flow Estimation under Monocular Epipolar Line Constraint”,
Mahmoud Mohamed, Hossein Mirabdollah, Baerbel Mertsching.
- “General Object Tip Detection and Pose Estimation for Robot Manipulation”,
Dadhichi Shukla, Özgür Erkent, Justus Piater.
|